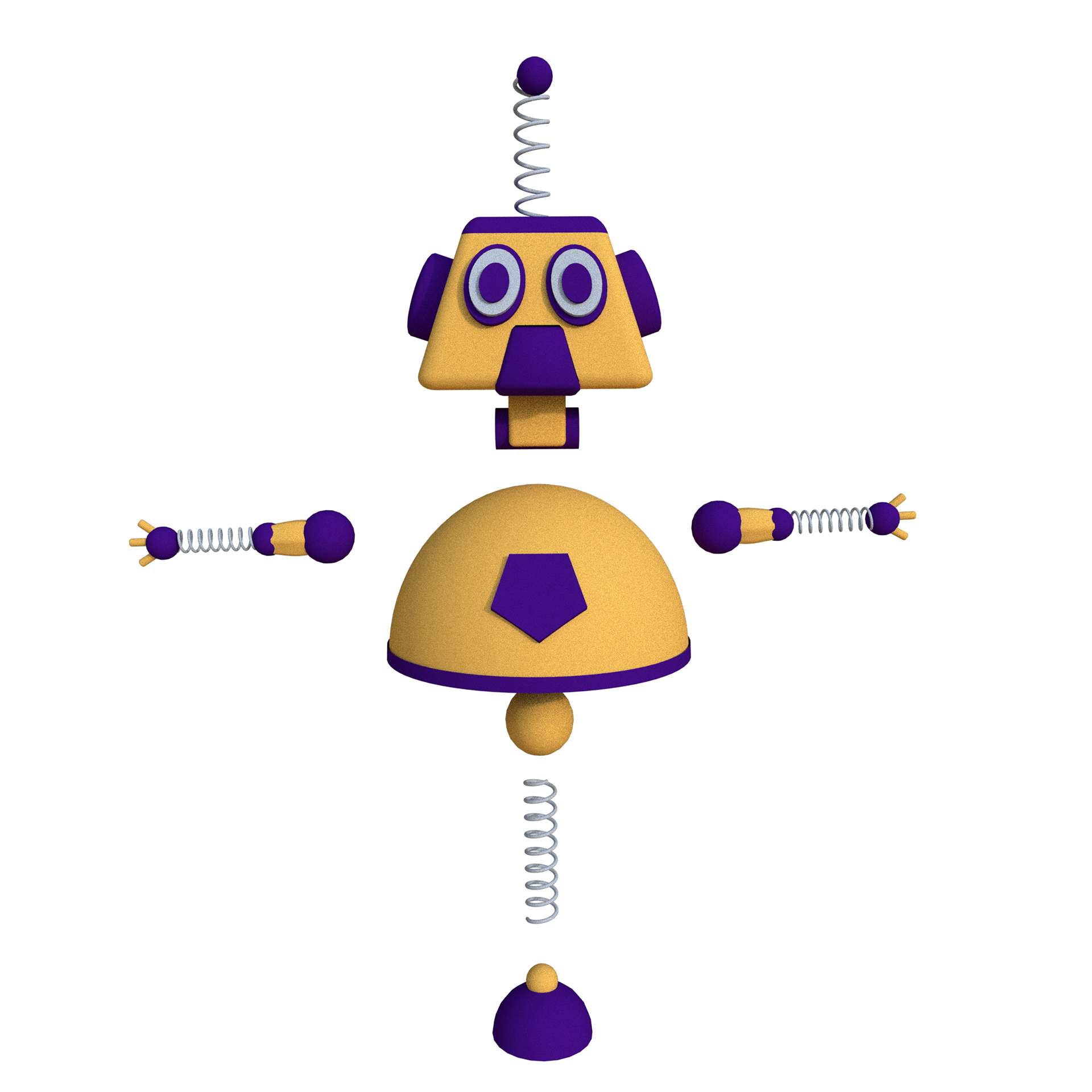
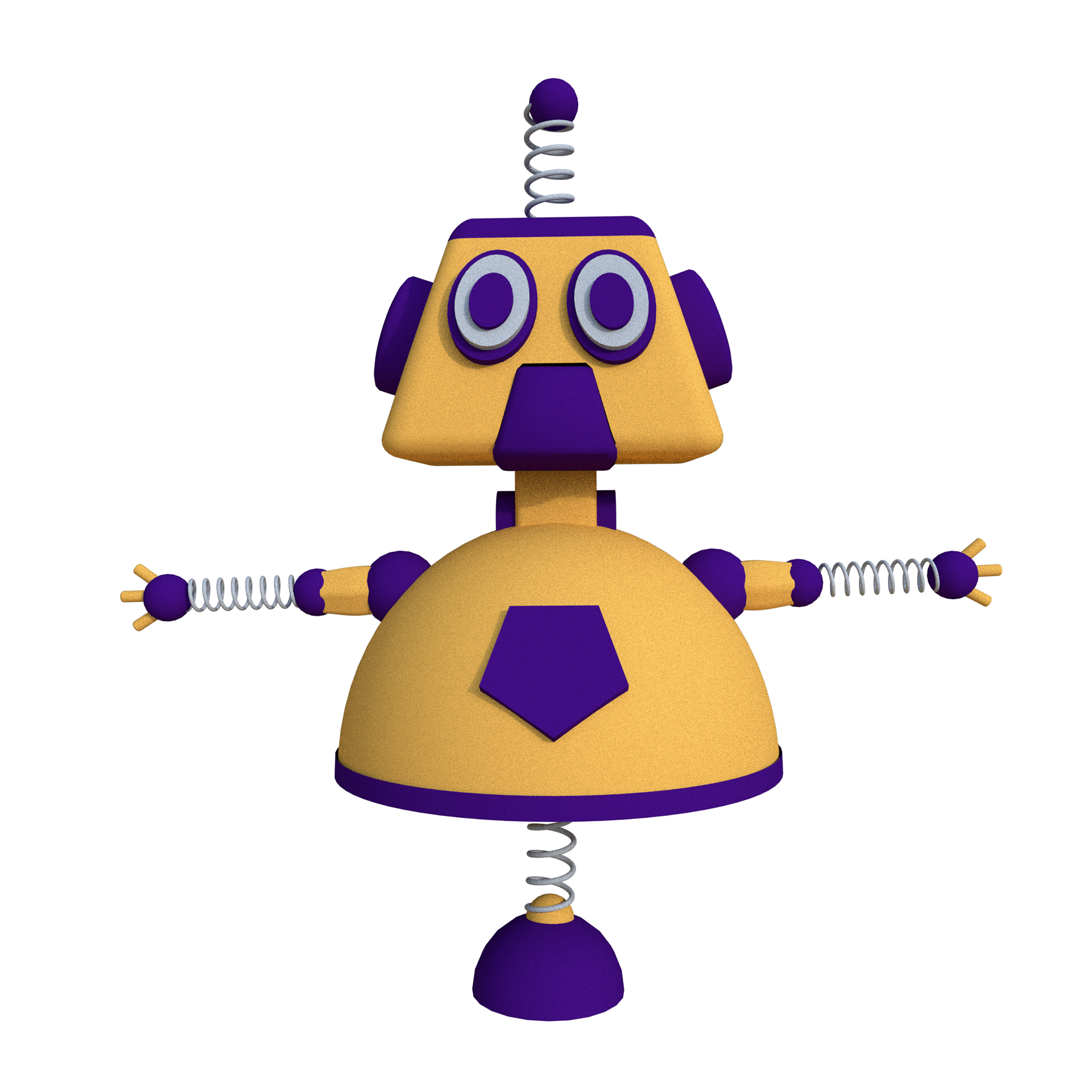
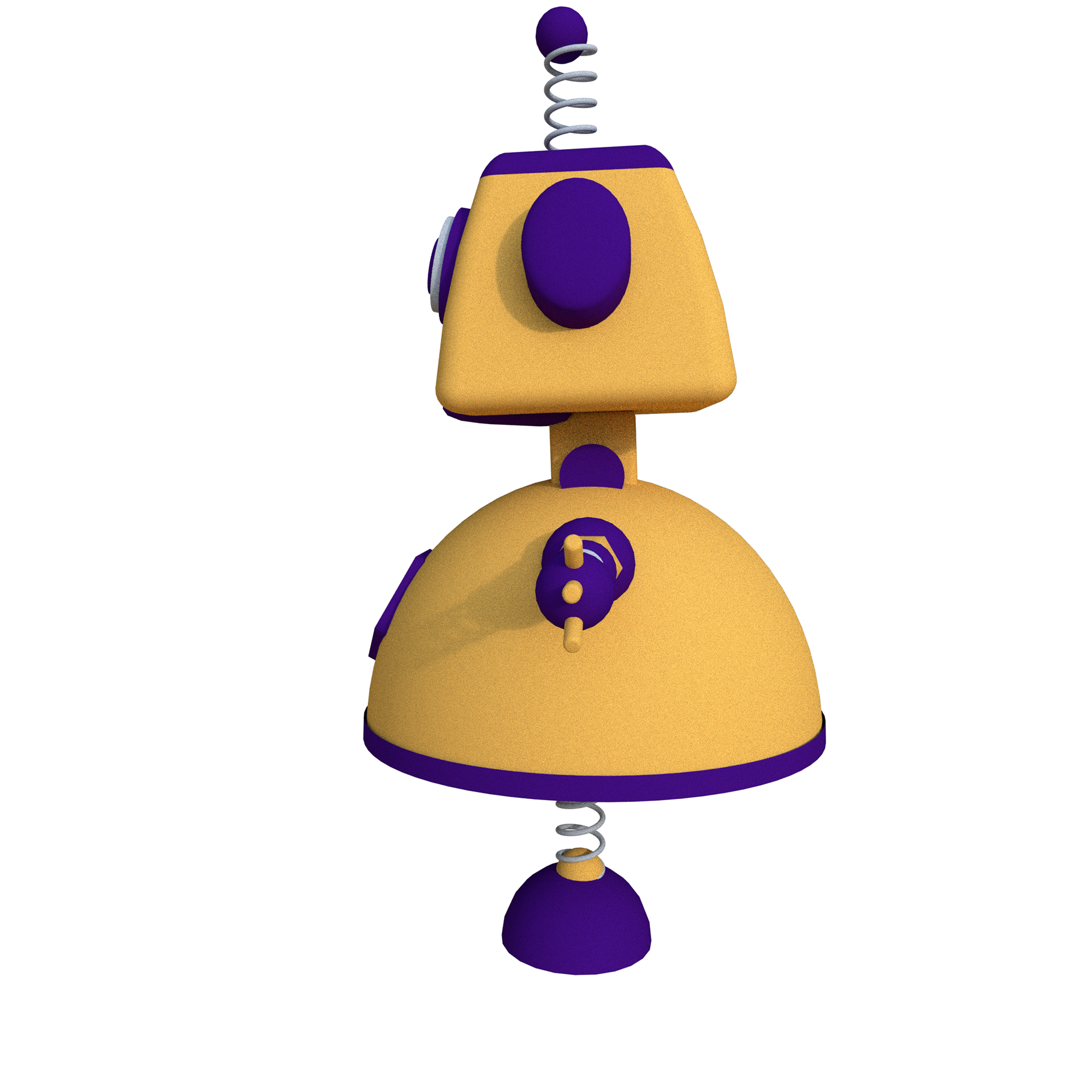
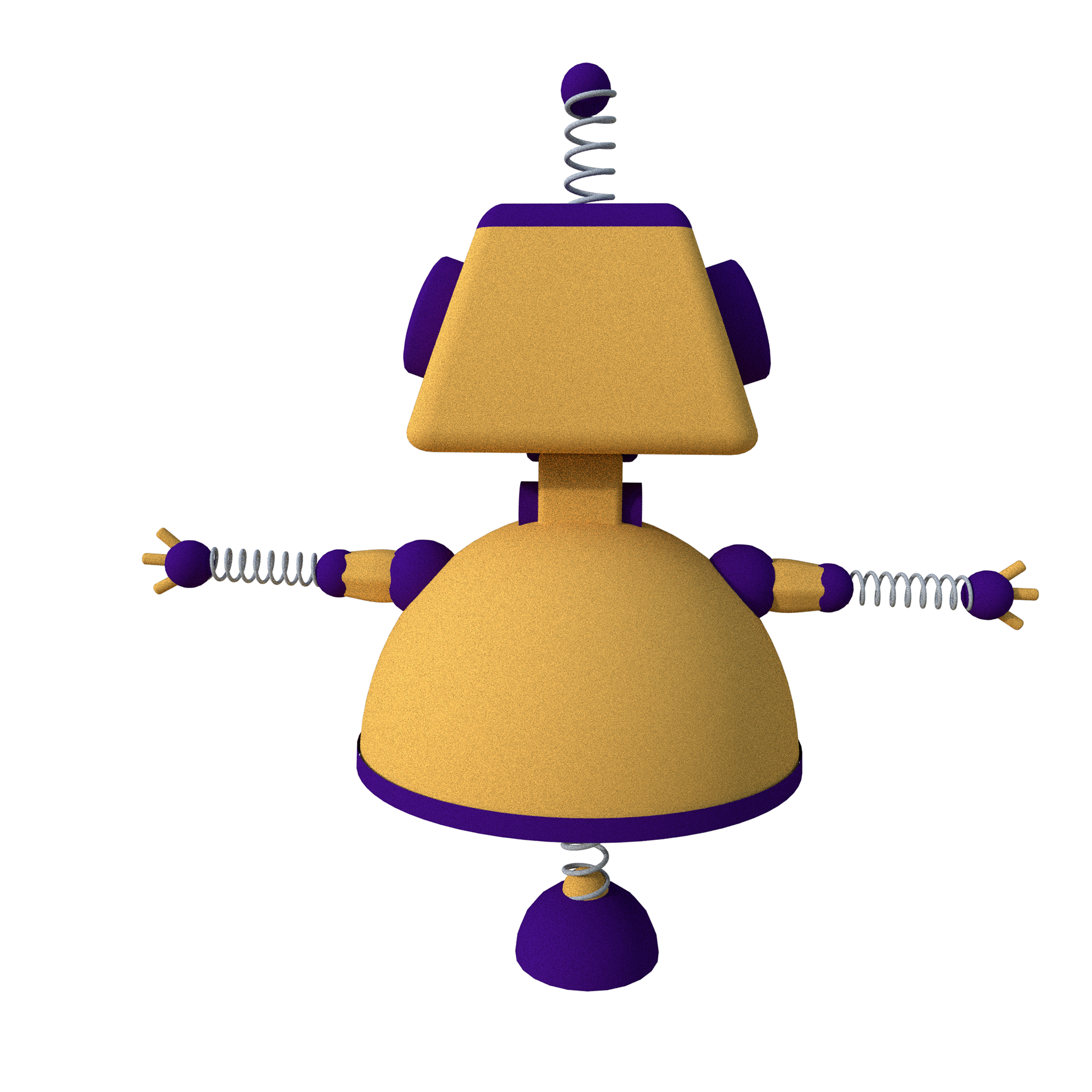
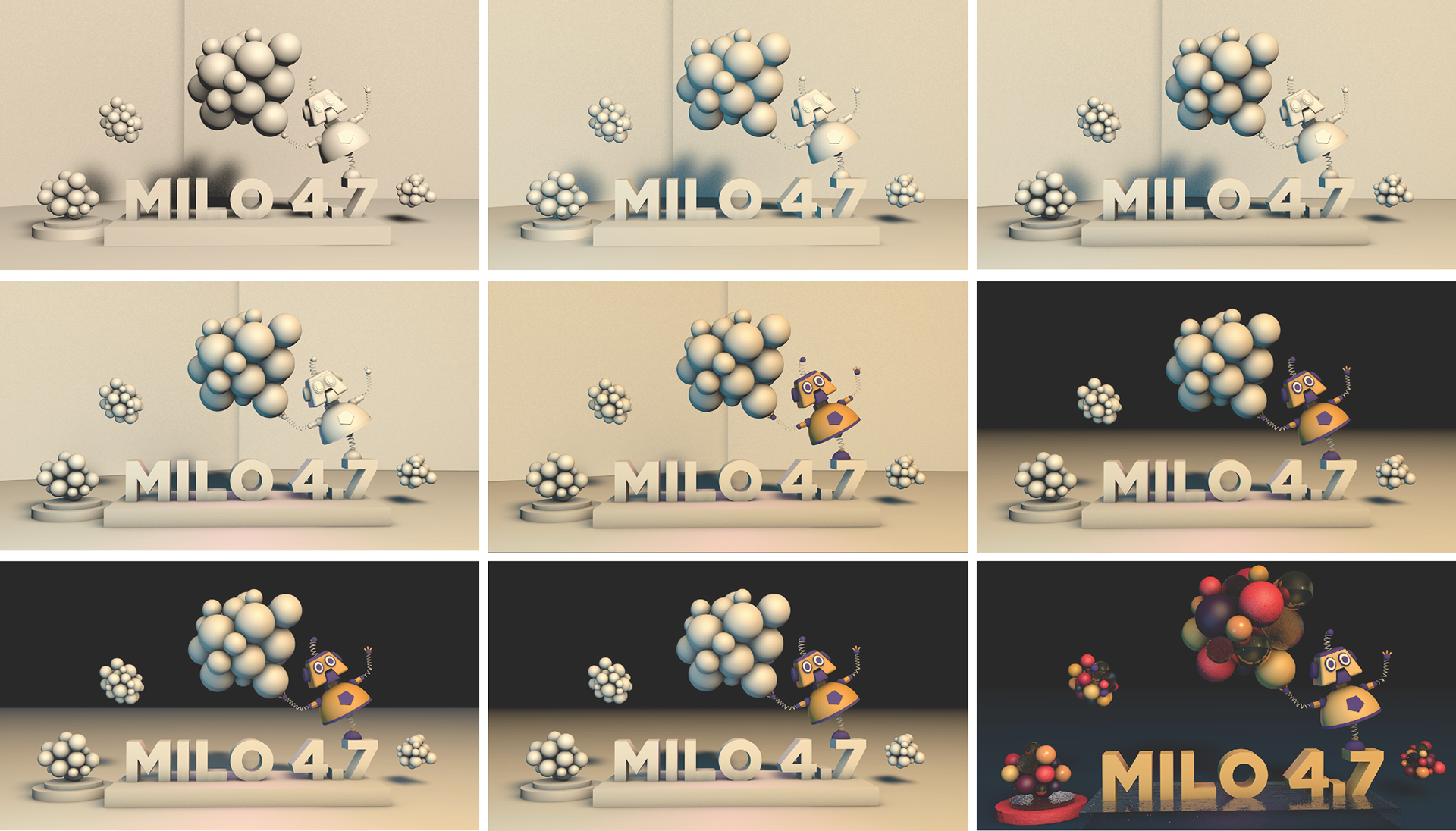
Milo 4.7. es un robot con muelles eléctricos en sus extremidades, lo que le permite estirarse y doblarse en diferentes direcciones. Consigue estabilidad gracias a su pie ventosa y se desplaza dando saltos.
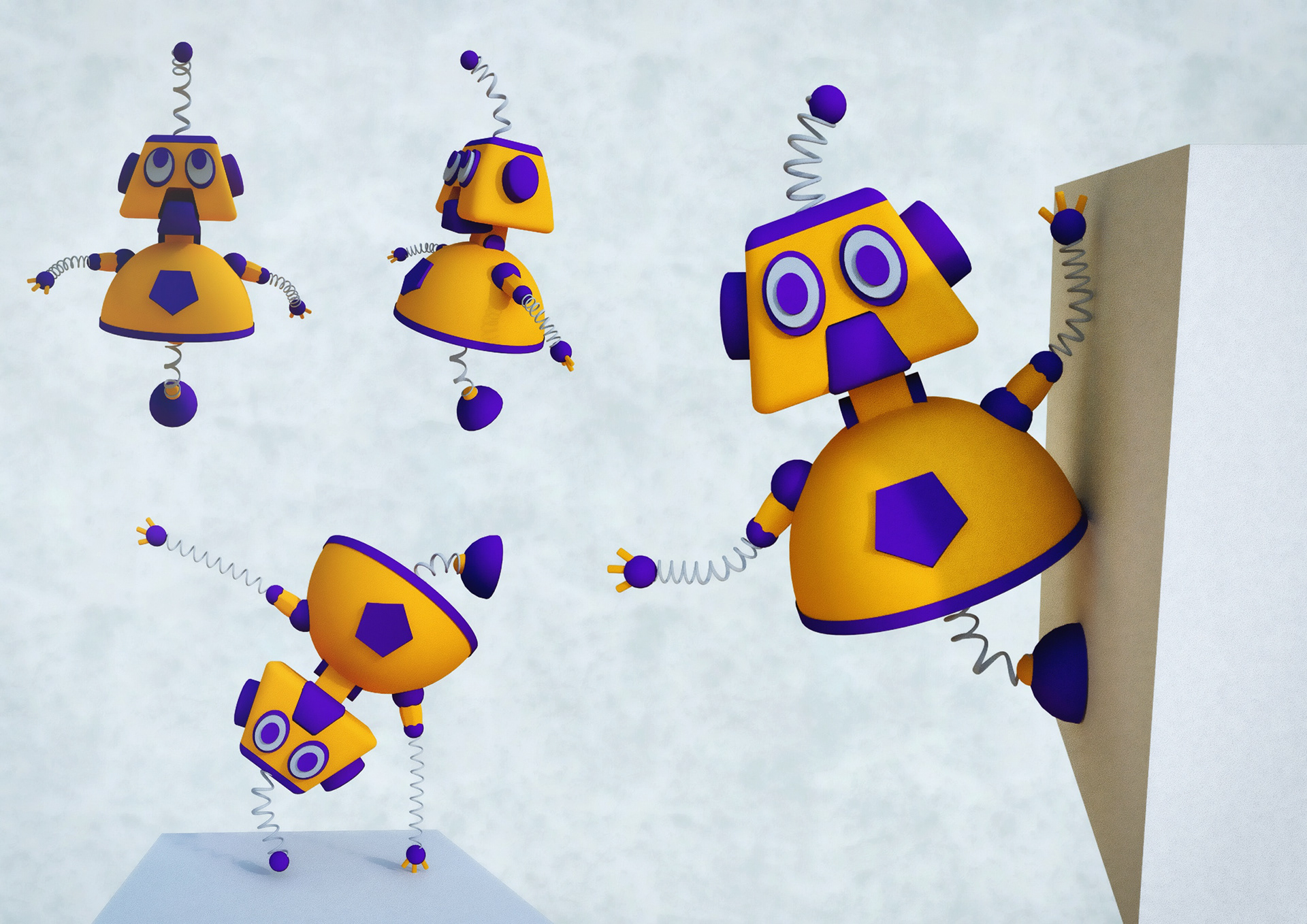
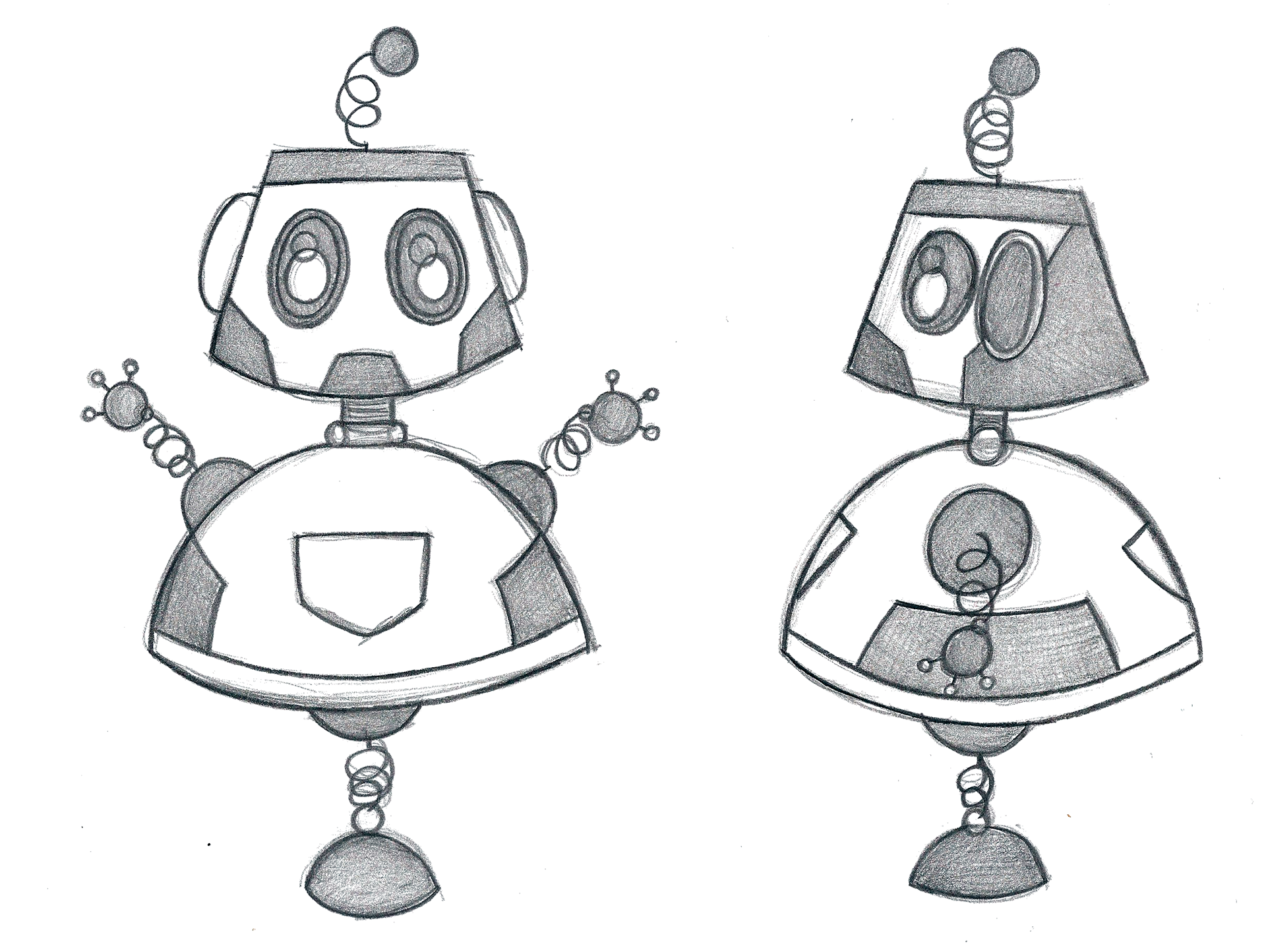
Milo 4.7 ha sido modelado en Cinema 4D estableciendo jerarquías de movimiento entre las distintas piezas que lo componen. El cuerpo tiene movilidad de giro en la cabeza, los brazos, el tronco, la boca y el pie. Además, a través de los muelles tiene movilidad elástica en la antena, los brazos y la pierna.
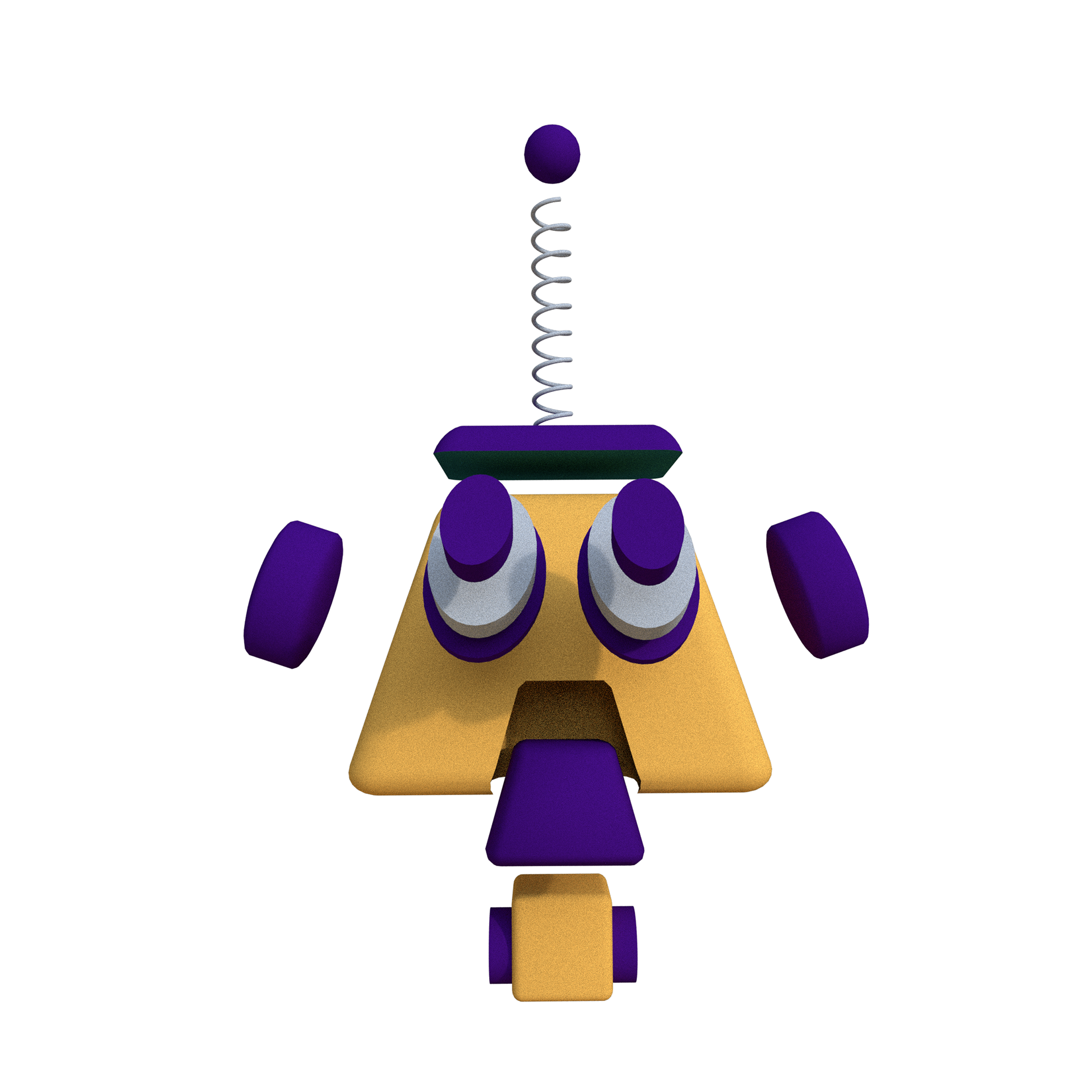
Con el personaje modelado en 3D, he creado una escena a base de figuras geométricas y letras, para poder trabajar distintas composiciones de iluminación. Se ha prestado especial atención a la creación de materiales propios con distintas propiedades de reflectancia, transparencia, textura, granulado, etc. En cuanto a la iluminación, se han realizado dos propuestas diferentes:
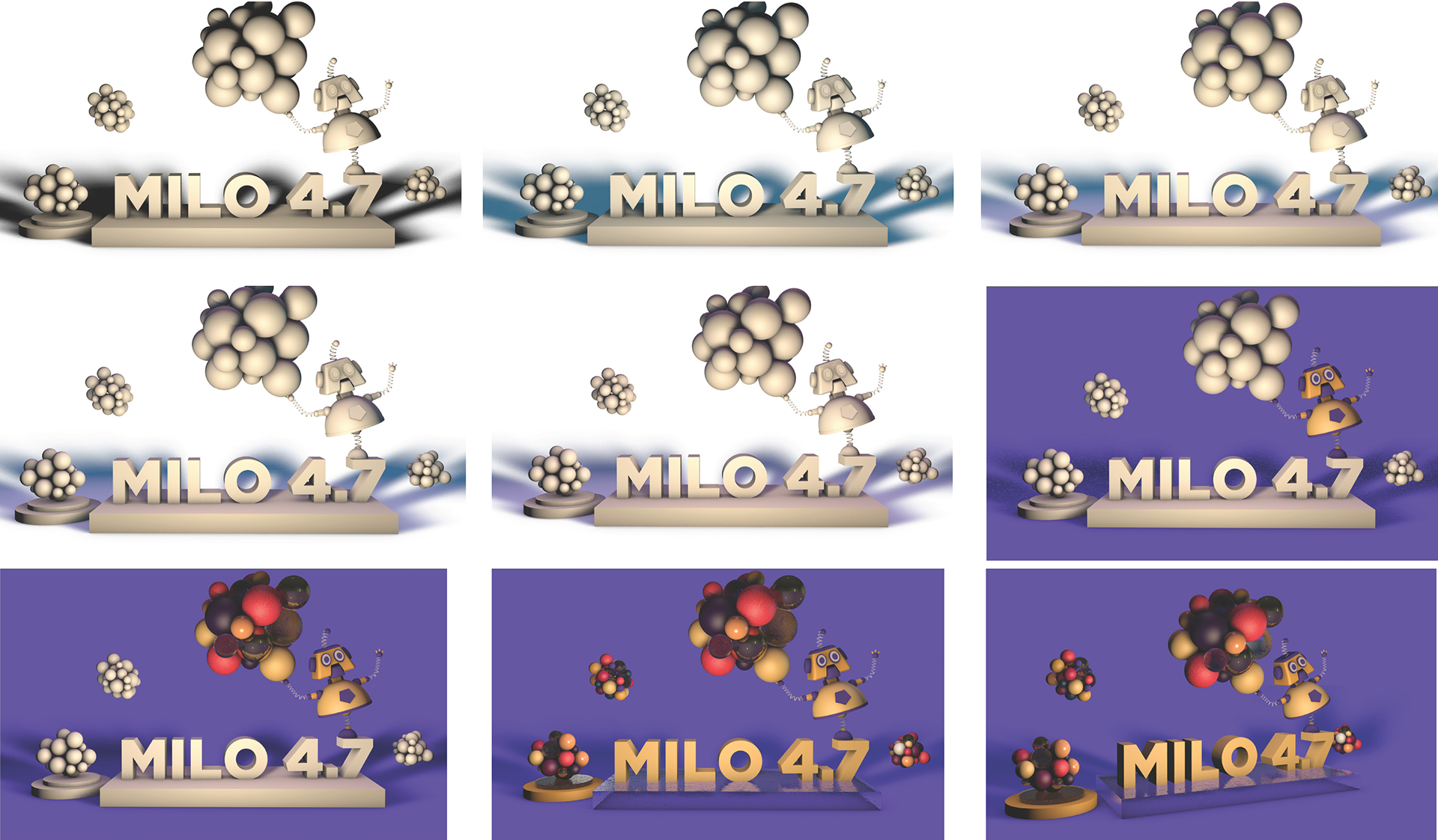
Con la composición de la escena finalizada, se ha realizado una breve animación de la cámara y de Milo para cada iluminación, unificando los resultados en el siguiente vídeo: